Home
Embedded C
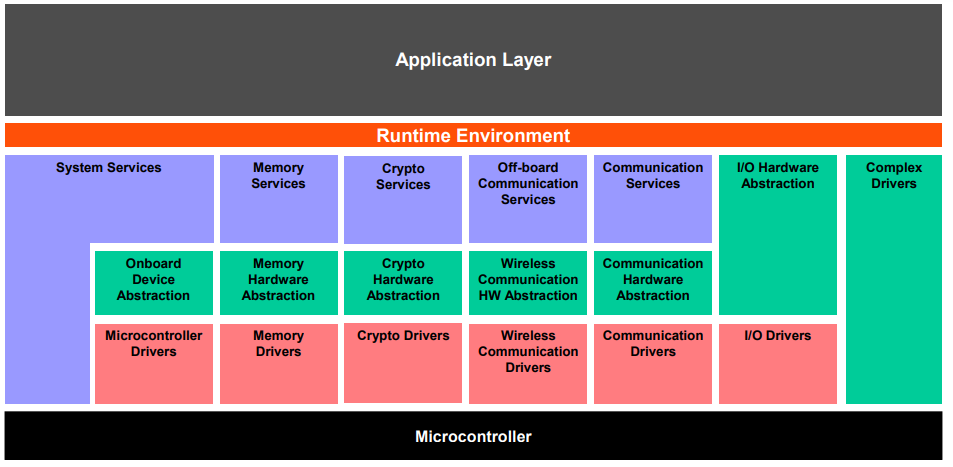
Autosar
_BSW
_MCAL
Embedded System
Micro-controllers
Autosar
Embedded System
Embedded C
Micro-controllers
Read more
List
Grid
PWM
| PWM (Pulse Width Modulation) in Embedded System
Watchdog stack
Watchdog Driver in AUTOSAR
Watchdog stack
Watchdog Manager in AUTOSAR
Watchdog stack
Watchdog Stack in AUTOSAR
Embedded System
Embedded System || Introduction || Lesson-1
Embedded C
Practical Embedded C || Preprocessor Directive || Chapter 2
Load More
Popular Posts
Autosar
AUTOSAR DEM Module
NVRAM Manager in AUTOSAR || Part -2
AUTOSAR DCM Module
Diagnostic stack in AUTOSAR
Watchdog Timer in Embedded System
To Top